※ 引述《ewings (火星人當研究生)》之銘言:
: ※ 引述《ykjiang (York)》之銘言:
: : 二維了。
: : 雷達基本上是機械動作在掃描
: : 初代的光達也一樣,最新的發展小型化後,有搞陣列方式同時發射好幾組雷射,不過
: : 解析度還是個問題
: 還是不曉得你在供三小
: 從雷達誕生以來,也從來沒出現過你口中的“一維”雷達
: https://en.m.wikipedia.org/wiki/Lichtenstein_radar
: 拿二戰裡的德國Lichtenstein雷達來說好了,雷達發射天線是固定在飛機的機首,
: 也沒有任何的機械機構讓天線搖動或轉動。
: 但是利用雷達波打到目標,再反射回上下左右四個天線的時間差,以及A-scope顯示器,
: 就能得知目標的在三維空間中的向量與距離。
: 而這個方式,特斯拉的雷達也在使用,只是特斯拉選的雷達,精度相比之下像玩具。
OK, 以雷達波的特性,的確如你說的,可以一個雷達波出去,同時有多組天線接收
這部分跟光達有差異。
: : 你講的 CMOS 果凍效應,不是 CMOS 的本質,而是數位化後,要將資料放在記憶體,
: : 從記憶體讀取時有先後順序,這基本上是電子式的掃描,跟前面的機械式有差距。
: 這邊也是看不懂你在講三小
: 就算是類比式的CCD,為了輸出NTSC/PAL的序列訊號,也是逐個cell掃描
: 和數位化一點鳥毛關係都沒有
你講的應該是 Rolling Shutter 造成的果凍效應,
CMOS 會採取 Rolling Shutter 有很多因素,例如為了功耗、快門速度、共用元件等
CMOS 後來也有 Global Shutter 的設計
Rolling Shutter 是同時一排 cell 曝光(不算逐個 cell,硬要挑的話)
Global Shutter 是全部的 cell 一起曝光
至於 CCD 是採用 Global Shutter 的設計
你說的為了輸出 NTSC/PAL 逐個 cell 掃描,是發生在後段處理上
: 另外,也一樣在半個世紀前,就已經有電子掃描陣列雷達的技術
: (electronically scanned array)
: 只是這種技術受到管制,車廠還想車賣到世界各地,多半不是很想用
: : 未來位置,
: : 你可以搜尋一下,有人就說這個是 4D 雷達
: 那只是營銷用的名詞,沒有一本教科書用4D雷達這種講法。
: : 去年 10 推出的 FSD Beta 8.1 跟今年三月的 FSD Beta 8.2 已經有立體視覺
: : 預計四月(如果沒延期的話)推出的 FSD Beta 9 會是 Musk 說的 4D 視覺
: : 深度一直為人所詬病的地方。
: : 就算如後面推文你說的,特斯拉前向三個鏡頭是不同測交距離的鏡頭,搞不出立體視覺
: : 但你忽略了特斯拉側前方還有兩個前向鏡頭,是完全對稱的測焦距離是一樣的80M以內
: https://img.laserfocusworld.com/files/base/ebm/lfw/image/2020/03/2004LFW_jh_1__2_.5e834778af184.png
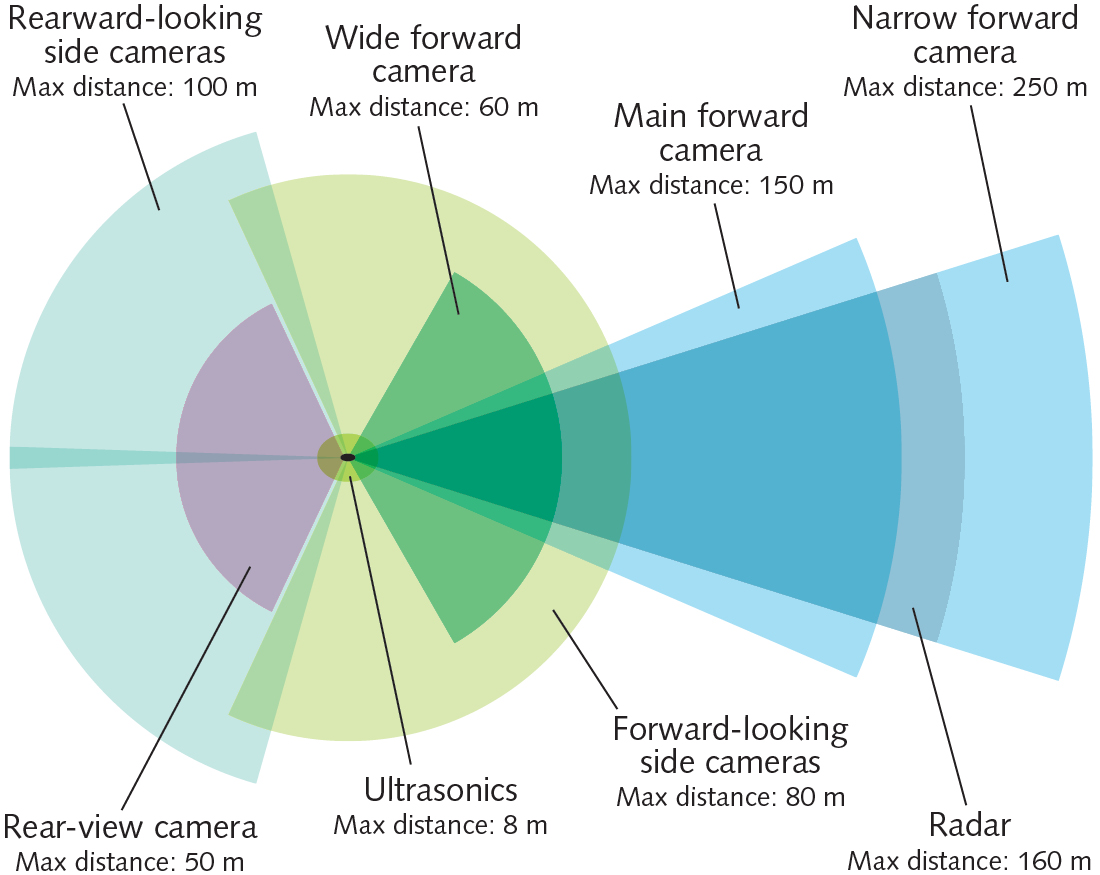 : 前方還有另外兩個80m的前向鏡頭?你是還沒睡飽嗎?
: 前方還有另外兩個80m的前向鏡頭?你是還沒睡飽嗎?
: 麻煩在圖裡面指給我看一看。
80m鏡頭,我是敲「側」前方的兩個前向鏡頭,不是敲(正)前向鏡頭
而且這已經不是重點了,
如之前推文說的,特斯拉 3D 視覺,主要是靠正前方那三個鏡頭
基本上沒側前方那兩個鏡頭的事了
--
: ※ 引述《ykjiang (York)》之銘言:
: : 二維了。
: : 雷達基本上是機械動作在掃描
: : 初代的光達也一樣,最新的發展小型化後,有搞陣列方式同時發射好幾組雷射,不過
: : 解析度還是個問題
: 還是不曉得你在供三小
: 從雷達誕生以來,也從來沒出現過你口中的“一維”雷達
: https://en.m.wikipedia.org/wiki/Lichtenstein_radar
: 拿二戰裡的德國Lichtenstein雷達來說好了,雷達發射天線是固定在飛機的機首,
: 也沒有任何的機械機構讓天線搖動或轉動。
: 但是利用雷達波打到目標,再反射回上下左右四個天線的時間差,以及A-scope顯示器,
: 就能得知目標的在三維空間中的向量與距離。
: 而這個方式,特斯拉的雷達也在使用,只是特斯拉選的雷達,精度相比之下像玩具。
OK, 以雷達波的特性,的確如你說的,可以一個雷達波出去,同時有多組天線接收
這部分跟光達有差異。
: : 你講的 CMOS 果凍效應,不是 CMOS 的本質,而是數位化後,要將資料放在記憶體,
: : 從記憶體讀取時有先後順序,這基本上是電子式的掃描,跟前面的機械式有差距。
: 這邊也是看不懂你在講三小
: 就算是類比式的CCD,為了輸出NTSC/PAL的序列訊號,也是逐個cell掃描
: 和數位化一點鳥毛關係都沒有
你講的應該是 Rolling Shutter 造成的果凍效應,
CMOS 會採取 Rolling Shutter 有很多因素,例如為了功耗、快門速度、共用元件等
CMOS 後來也有 Global Shutter 的設計
Rolling Shutter 是同時一排 cell 曝光(不算逐個 cell,硬要挑的話)
Global Shutter 是全部的 cell 一起曝光
至於 CCD 是採用 Global Shutter 的設計
你說的為了輸出 NTSC/PAL 逐個 cell 掃描,是發生在後段處理上
: 另外,也一樣在半個世紀前,就已經有電子掃描陣列雷達的技術
: (electronically scanned array)
: 只是這種技術受到管制,車廠還想車賣到世界各地,多半不是很想用
: : 未來位置,
: : 你可以搜尋一下,有人就說這個是 4D 雷達
: 那只是營銷用的名詞,沒有一本教科書用4D雷達這種講法。
: : 去年 10 推出的 FSD Beta 8.1 跟今年三月的 FSD Beta 8.2 已經有立體視覺
: : 預計四月(如果沒延期的話)推出的 FSD Beta 9 會是 Musk 說的 4D 視覺
: : 深度一直為人所詬病的地方。
: : 就算如後面推文你說的,特斯拉前向三個鏡頭是不同測交距離的鏡頭,搞不出立體視覺
: : 但你忽略了特斯拉側前方還有兩個前向鏡頭,是完全對稱的測焦距離是一樣的80M以內
: https://img.laserfocusworld.com/files/base/ebm/lfw/image/2020/03/2004LFW_jh_1__2_.5e834778af184.png
: 麻煩在圖裡面指給我看一看。
80m鏡頭,我是敲「側」前方的兩個前向鏡頭,不是敲(正)前向鏡頭
而且這已經不是重點了,
如之前推文說的,特斯拉 3D 視覺,主要是靠正前方那三個鏡頭
基本上沒側前方那兩個鏡頭的事了
--
All Comments